Fractionated Spacecraft for Distributed Surveillance and Rendezvous with Temporarily Captured Near-Earth Asteroids
Near-Earth Asteroids (NEAs) are suitable candidates for sample-return missions, due to their low delta-v requirements. The delta-v can ideally become sufficiently small such that MicroSat technologies can be utilized, which are based on Commercial Off-The-Shelf (COTS). Further, as such types of spacecraft generally have payload restrictions allowing for only a single optical payload, a fractionated system consisting of heterogeneous optical payloads would provide the necessary sensing suite.
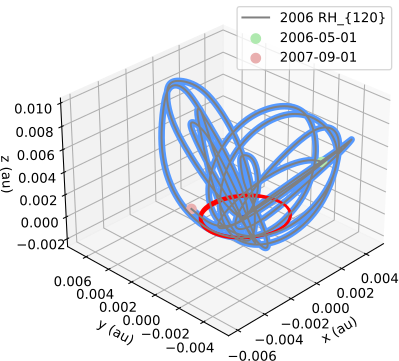
Of the NEAs known to us, there is a particular group that represents much lower delta-v missions. Temporarily Captured Asteroids (TCAs), also referred to as minimoons, are small asteroids that enter the Earth-Moon system (EMS) for a short period of time. Simulations have shown that at any time there should be at least one TCA with a roughly 1m diameter orbiting Earth. However, with the current ground-based telescopes, it is unlikely that TCAs will be detected more than once per decade.
The need for more frequent detection of TCAs, coupled with the current lack of a dedicated and capable ground-based system, motivates the use of space-borne strategies for TCA surveillance. The advantages of a space-based system in observation are generally challenged by a higher cost and a lower degree of fault-tolerance. A recent notion for space systems, which can be used for space-borne observation, is Distributed Satellite Systems (DSS), whereby a constellation or formation of satellites cooperatively performs the observations, which can address the issue of fault-tolerance.
This research attempts to develop a framework for exploring TCAs, which is currently lacking in the space community. Specifically, the research objective includes mission analysis and synthesis for the detection of and eventual rendezvous with a TCA, through a formation of miniaturized satellites using COTS components, adopting a DSS architecture with fractionated optical payloads.

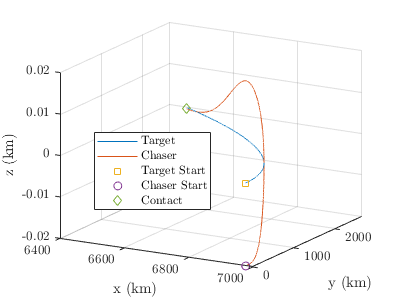
Optimal Trajectory Planning for Close-Range Rendezvous and Synchronization
It is desirable to seek minimum-energy trajectories for any orbit maneuver in order to improve spacecraft longevity. Unlike some satellites whose orbit maneuver tasks are limited to station-keeping and collision-avoidance, spacecraft designed for In-space Servicing, Assembly, or Manufacturing (ISAM) are expected to perform extensive orbit maneuvers. For such spacecraft, it is crucial that they maximize their energy efficiency. Many trajectory planning methods for orbit transfer assume that the acceleration direction is unconstrained. However, in the case for close-range rendezvous and synchronization using underactuated spacecraft, this assumption does not hold, as the thrust direction is dependent on the spacecraft’s attitude, and the reorientation time is not negligible. We propose a geometry-based trajectory planning optimization method for both fully-actuated spacecraft as well as underactuated spacecraft.
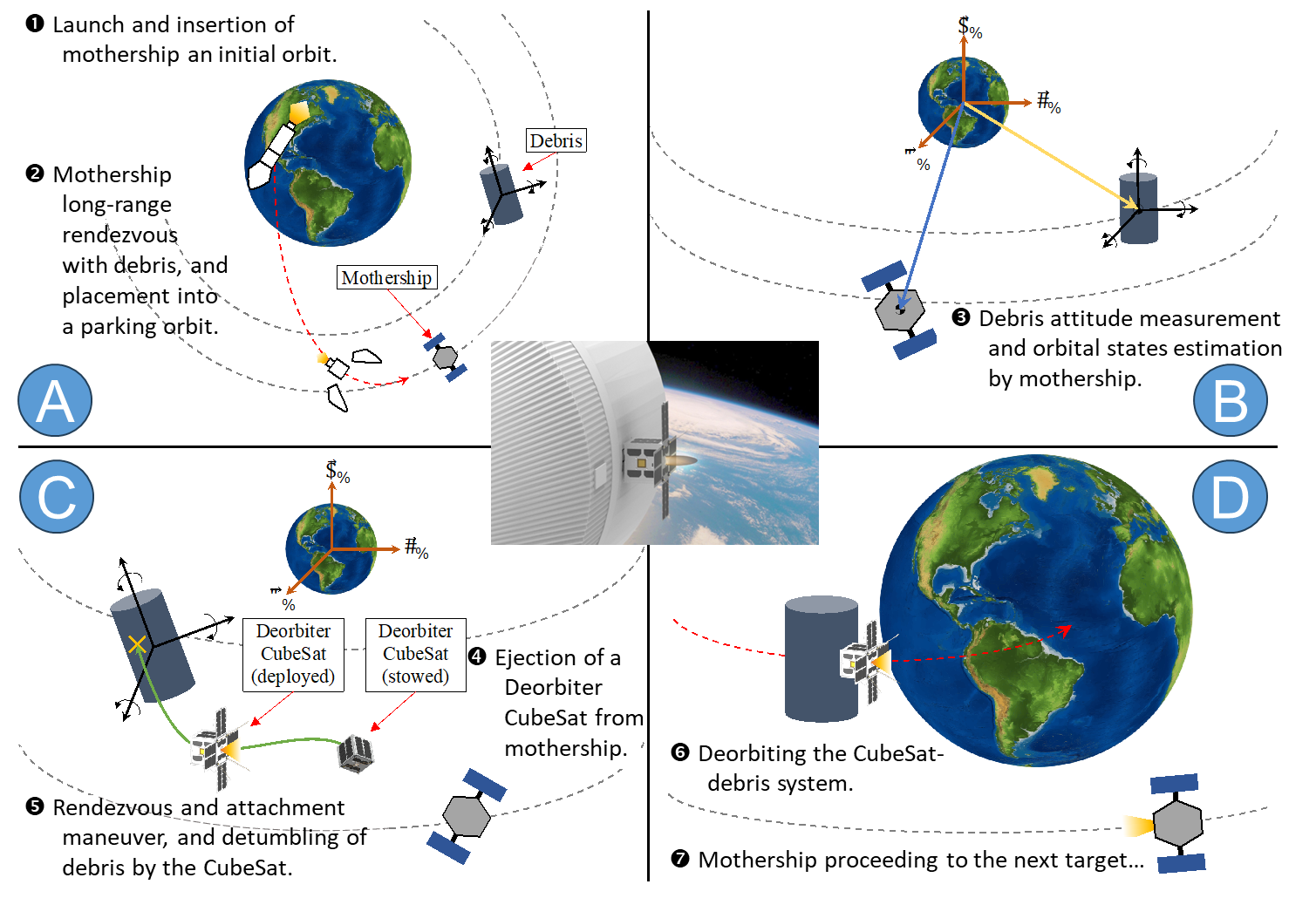
Deorbiter CubeSat for Active Space Debris Removal
The mission and system design of a CubeSat-based active debris removal approach intended for transferring sizable debris objects from low-Earth orbit to a deorbit altitude of 100 km. The mission consists of a mothership spacecraft that carries and deploys several debris-removing nanosatellites, called Deorbiter CubeSats. Each Deorbiter is designed based on the utilization of an eight-unit CubeSat form factor and commercially-available components with significant flight heritage. The mothership spacecraft delivers Deorbiter CubeSats to the vicinity of a predetermined target debris, through performing a long-range rendezvous maneuver. Through a formation flying maneuver, the mothership then performs in-situ measurements of debris shape and orbital state. Upon release from the mothership, each Deorbiter CubeSat proceeds to performing a rendezvous and attachment maneuver with a debris object. Once attached to the debris, the CubeSat performs a detumbling maneuver, by which the residual angular momentum of the CubeSat-debris system is dumped using Deorbiter’s onboard reaction wheels. After stabilizing the attitude motion of the combined Deorbiter-debris system, the CubeSat proceeds to performing a deorbiting maneuver, i.e., reducing system’s altitude so much so that the bodies disintegrate and burn up due to atmospheric drag, typically at around 100 km above the Earth surface.
.
Pre-Phase A Design of a Lunar Robotic Construction System (LRCS)
Many countries, including China, India, Russia, and the United States, have set their sights on furthering human presence on the Moon. NASA’s Artemis Program, for instance, aims to return humans to the Moon by the end of 2024, and establish a sustainable human presence at the lunar South Pole by the late 2020s, which would heavily rely on the establishment of lunar infrastructure, such as the Artemis Base Camp. A particularly crucial prerequisite to such infrastructure is the creation of berms, shelters and other protection means for the equipment and machines that will be initially deployed. Consequently, a major challenge is the scale of the work required for such a preparatory step. Planetary robotics for years has been focused on exploration, where the primary goal is merely scientific, and robots need to minimally manipulate and interact with local resources. The construction of lunar infrastructure, on the other hand, will require extensive in-situ resource utilization (ISRU) reliably and at scale. Therefore, there is a need for robotic construction systems that can safely and efficiently manipulate and integrate the simplest and most readily available materials on the Moon, namely, the raw lunar regolith, for building berms and shelters for the equipment and machines.
To address these challenges, our laboratory is developing a Lunar Robotic Construction System (LRCS) for filling and manipulation of Regolith Containment Units (RCUs) along with MDA Space. The RCUs, assumed to be analogous to terrestrial sandbags, are to be used as general construction units to form structures such as berms and shelters for surface equipment and machines

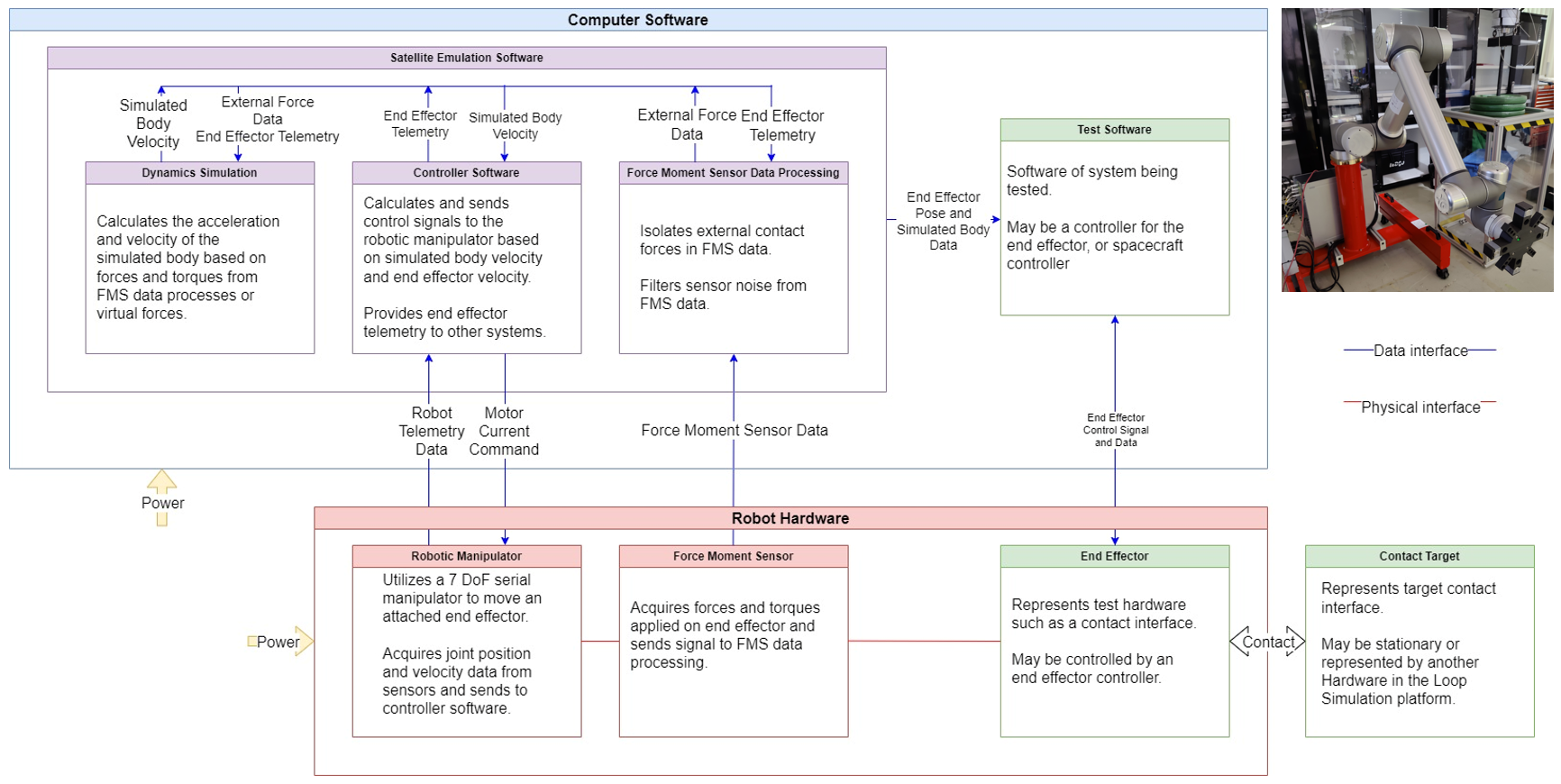
Hardware-in-the-loop Space Simulation for Satellite Testing
There is a growing focus on the development of Active Debris Removal and On-Orbit-Servicing methods in order to deal with the increasing danger posed by space debris to infrastructure in Earth orbit. The Aerospace Mechatronics Laboratory is developing an innovative, low-cost Active Debris Removal spacecraft named the Deorbiter Cubesat which will rendezvous and attach to large space debris and move them to burn up in Earth atmosphere. A challenge in the development of the Deorbiter Cubesat is the testing of the close-range rendezvous and attachment phase of the mission, which cannot be easily replicated in numerical simulation. The laboratory is working in collaboration with the Canadian space company MDA to develop a Hardware-in-the-Loop Simulation (HILS) platform for testing close-range rendezvous and contact phases in Active Debris Removal or On-Orbit Servicing missions. This HILS platform will be used to test the Deorbiter Cubesat’s autonomous rendezvous algorithm and attachment mechanism.
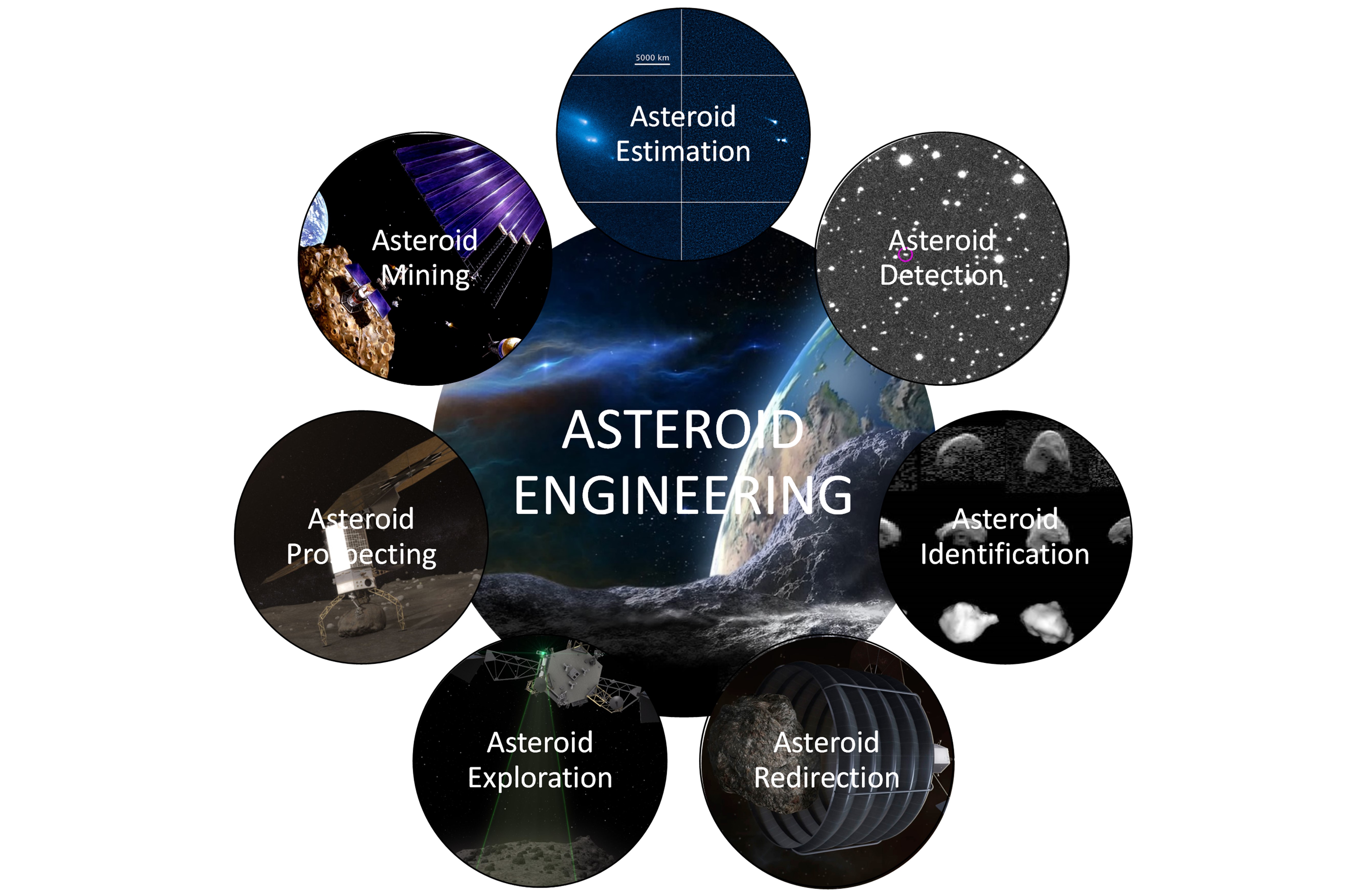
Asteroid Engineering
The research is an attempt to pave the ground for a new field of Asteroid Engineering, which is characterized as “the science and technology of exploring, accessing asteroids and/or making them accessible to avoid collision with Earth and to retrieve and process both information and raw materials from them for scientific activities as well as Earth and space developments.” Discovery, identification, redirection, and utilization of small near-Earth asteroids, with a diameter of a couple of hundred meters or less, may require a drastic change of approach to designing in-situ asteroid exploration missions through the invention of more advanced space telescopes as well as constellations and formations of small satellites. It is likely that such advancements will occur in the coming decade, especially from the private sector as well as academic community, to create a paradigm shift, both qualitatively and quantitatively, towards cost-effective, fast-pace research and development initiatives in the field. Further, there is a need for creating new educational programs to train competent engineers and researchers for the taskforce in the new field of asteroid engineering in near future. The next decade will grant us a quantum leap forward for the enrichment of our knowledge and resources obtained from near-Earth asteroids.