Holistic Mechatronics
This research outlines a holistic concurrent design methodology that enhances communication between designers from various disciplines through
introducing the universal notion of satisfaction and expressing the holistic behaviour of multidisciplinary systems using the concept of energy.
The methodology formalizes subjective aspects of design, resulting in the simplification of the multi-objective constrained optimization process.
The impact of the designer’s subjective attitude throughout the design is also formalized and adjusted based on a holistic system performance by
utilizing an energy-based model of multidisciplinary systems. The application of the methodology to a 5 D.O.F industrial robot manipulator has shown
promising results.
Reconfigurable Mechatronics
The research focuses on the development of a concurrent design framework for autonomously reconfigurable mechatronic systems. Using manifold topology as an abstract representation of the system configuration, Reconfigurable Mechatronics utilizes a template-based approach along with manifold path planning to select a task-based desirable configuration for the inherently-redundant multidisciplinary systems. The merits of the methodology are shown through its applications to reconfigurable robotic rovers as well as a newly-designed 18 D.O.F. autonomously-reconfigurable serial manipulator.


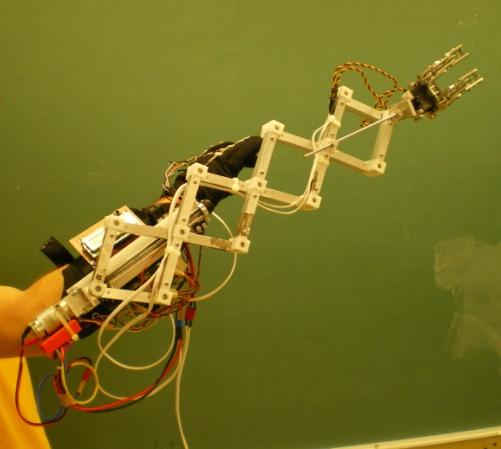
Mechatronics by Analogy
The research postulates that by establishing a similarity relation between a complex system and a number of simpler systems it is possible to design the former using the analysis and synthesis means developed for the simpler systems. The methodology provides a framework for concurrent engineering of multidisciplinary systems while maintaining the transparency of the system behaviour through making formal analogies between the system and those with more tractable dynamics. The methodology is successfully applied to the design of a monopod robotic leg.
Heterogeneous Robotic Team
The implementation of knowledge-base hierarchical control schemes is studied for developing new architectures that allow a team of non-uniform (with respect to both software and hardware) rover platforms to communicate
and collaborate in performing various tasks and also to enhance their collective performance in time, without the intervention of a central server or operator. Using multiple robots with diverse capabilities can result in performing complex tasks by simple individual robot platforms, as can be observed repeatedly in the nature, such as insect colonies. The challenge, however, is to build a simple yet effective means of communication and
knowledge integration. The focus of this research is on the methods of parsing the tasks of overall mission objectives and mapping them onto a heterogeneous group of robotic platforms, as well as techniques for the integration of perceptual information packets obtained from heterogeneous robots and their synthesis into a coherent picture for a remote operator’s
situational awareness.

Intelligent Robotic Swarm
The research addresses Insect Robotics, which is inspired by social insects.
Five major characteristics distinguish insect robots from other multi-agent robotic teams, namely homogeneity, simplicity and compactness, agent-to-agent communication, distributed control strategy, and social learning. Although social insects have simple brains, they are capable of navigating, interacting and cooperating with each other. These characteristics are implemented through the creation of large quantities (tens to thousands) of rover platforms, equipped with sensors and on-board processors, which are small, simple, and cheap, and which collectively behave similarly to a colony of ants in terms of navigation, communication, interaction, and social learning. Such a study will be unique for its attempt to develop a systematic and pragmatic distributed control architecture that accommodates both individualistic navigation/localization and social collaboration/interaction and learning.
Free-base Robot Manipulation
The research aims at reformulating the kinematic and dynamic equations of free-base manipulators, based on symplectic geometry, in order to obtain suitable laws for the concurrent base-manipulator motion control. The goal is to develop new generation of free-flying manipulators that can be released from the base station for reaching larger workspaces. Free-flying and free-floating manipulators are widely used in space applications. In terrestrial applications, mobile manipulators are also gaining popularity for their large workspace. Since these mechanisms are mounted on non-stationary bases, their kinematics, dynamics and controls are highly coupled with those of their bases. This research aims at reformulating the kinematic and dynamic equations of free-base manipulators, in general, based on symplectic geometry, in order to obtain suitable laws for the concurrent base-manipulator motion control.
Aerospace Remote Experimentation
The research attempts to establish a transformative vision of remotely-accessible aerospace laboratories for both pedagogical and research purposes. The goal is to enable students and researchers to reliably operate remote devices (such as manipulators) in space and also conduct from Earth future experiments on the moon. Furthermore, a common problem with presenting experimental research results in various communities, such as robotics and aerospace, is the lack of a “unique” setup by which the research hypotheses have been examined. In robotics, for example, a new control algorithm, works marvelously on a 4-degree-of-freedom robot with short links and comes to the literature as a breakthrough. But, later on another researcher argues that the same algorithm causes poor performance on a different robot. Thus, researchers of a community around the world would welcome a “unique remote-access laboratory” with which all the new research works are examined, so that experimental data and outcomes have a unified and consistent meaning for the entire community. For example, a central aerospace robotics laboratory, would be an interesting asset for the researchers around the world to access it remotely and perform their experiments.
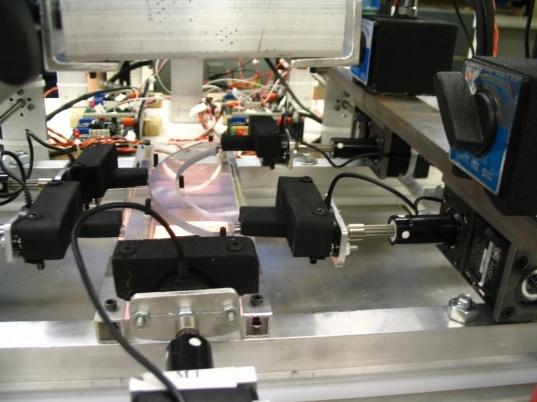
Robotic Hardware-in-the-loop Simulation
This research attempts to develop a practical framework for the concurrent engineering of reconfigurable robot manipulators through the development of a hardware-in-the-loop simulation platform. Reconfigurable robot manipulators have recently received a growing increasing attention from both research community and industry for their potential benefits of versatility in task orientation and adaptation to changing environments. Design of such systems is complicated, as the conventional “decoupled” or “loosely coupled” approaches cannot provide satisfactory solutions with the proliferation of advanced high speed automation systems. This research addresses a knowledge-based concurrent analysis and synthesis methodology for the detail-level engineering of reconfigurable robot manipulators, with the aid of a scalable, object-oriented hardware-in-the-loop simulation platform. Key features of the platform are: hierarchical and modular architecture, knowledge-base capability, object-oriented modeling and design, reconfigurability and scalability, and distance communication between distributed designers and remote hardware/software modules.

Detail-level Concurrent Engineering of Mechatronic Systems
Systematic concurrent methodologies, such as Linguistic Mechatronics, are applied to realistic design problems to investigate their merits and also find better solutions for complex systems. The market-driven need for multidisciplinary design of mechatronic systems has recently been recognized by the research community and by funding organizations. However, much of the literature on mechatronics design focuses on specific applications, and the multidisciplinary design in them is mostly based on ad hoc strategies for incrementally changing the conventional sequential design into a subsystem-based methodology. Some of the applications include fast-running legged robots, autonomously reconfigurable robot manipulators, rehabilitation robotics, etc.
Object-oriented Mechatronics Modeling and Design
The research extends some of the current object-oriented modeling approaches to concurrent modeling and design of aerospace systems, through which various functional modules can be built and synthesized by integrating programmatic elements (mechanical, electronic, computer, etc.) from pre-assembled libraries of reusable components. Interpretation of aerospace systems, in the form of mathematical textual coding, requires fundamental multidisciplinary knowledge and expertise. Hence, team work is an essential feature of aerospace systems design. Nonetheless, different disciplines conceptualize and represent their knowledge differently. Consequently, it becomes difficult for the participating disciplines to communicate their points of view, let alone collaborate with each other as required in a concurrent design. Hence, a unified system description language is essential for the concurrent design, which interprets different components of the aerospace systems without addressing their underlying theory. Furthermore, a graphical design entry tool with guided and automatic synthesis features will present all functional modules as finite state machines, so that designers can combine them concurrently using a high-level state-flow language. The entire object-oriented interface provides the designers with a hierarchical abstraction from conceptualization through functional decomposition to detailed design.
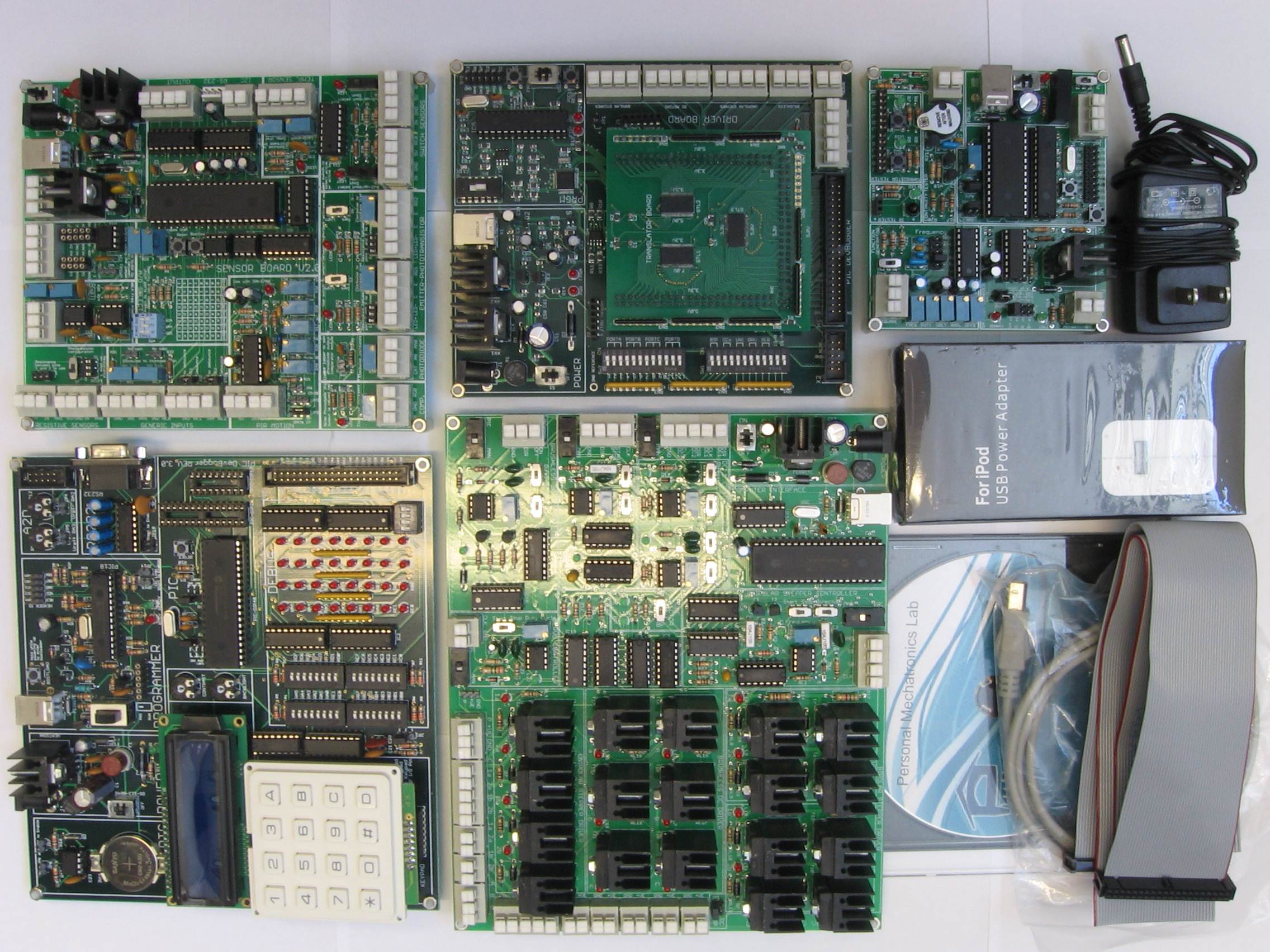
Mechatronics Pedagogy
The research attempts to develop a hybrid framework for teaching mechatronics that synergistically utilizes the two rival learning theories, namely behaviourism and constructivism. Behaviourism conceives learning as dissemination of knowledge via abstract representation of reality, and thus prescribes teaching as transfer of the knowledge from expert to learner. On the other hand, constructivism sees knowledge as a subjective and dynamic product of knower’s experiential world constructed through the senses and social interactions, and thus defines the role of teacher not to dispense knowledge but to serve as a creative mediator and facilitator. The premise of this research is that teaching mechatronics requires both direct instruction and learner-controlled knowledge construction. Hence, both theories must be utilized in a unified framework. Such a framework can be built based on an instructional design theory, namely Elaboration Theory, which allows a gradual transition from content-based to activity-based learning process. One key outcome of the research is the development of an affordable, comprehensive, and transparent Personal Mechatronics Laboratory toolkit for students and researchers.